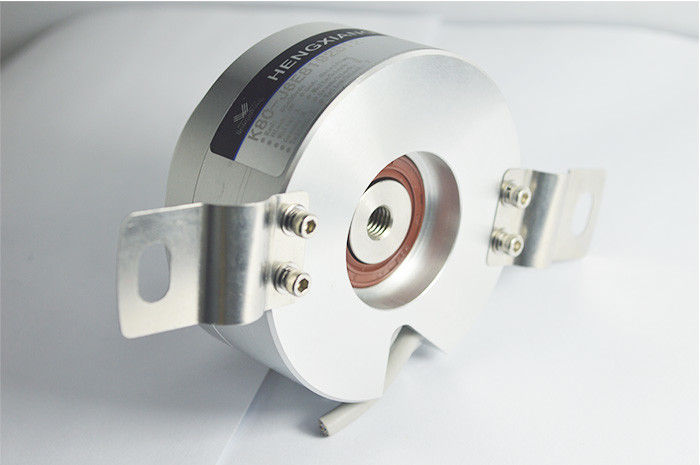
Conventional rotary encoder K80 aluminum alloy material hollow shaft encoder for elevator
Process of payment:
1. T/T, western union, credit card, Paypal, etc
2. 3-5 working days after payment received
3. Encoders will be shipped once ready
![]()
Encoder model number for K80 Encoder
K80-S6C16384B12
K80-SE4E14400B10
K80-S3F8192B15
K80-SE2V7200B19
K80-S1N5000B14
K80-SE6E2500B20
K80-S4C1800B14
K80-SE3VL1200B15
K80-S2F1024B16
K80-SE1N1000B18
K80 rotary encoder Product Information
| Items | Basic parameters |
| Encoder type | Incremental encoder |
| Brand | HENGXIANG |
| External diameter | 80mm |
| Thickness | 50mm |
| Installation dimension | R60.5mm(spring plate 76T69) |
| Hollow shaft type | through hole |
| Hollow shaft diameter | 10.5mm; 12mm, shaft diameter can be customized. |
| Output mode | NPN/PNP(Open Collector Output) |
| Voltage output | |
| Push-pull output | |
| line drive (26LS31) TTL | |
| line drive(DC8-30V) HTL | |
| Consumption current | 100mA MAX |
| Top response frequency | 300KHZ |
| Allowable ripple | ≤3%rms |
| Load Voltage | ≤DC30V |
| GND | not connect to encoder |
| Mark to Space ratio | 45% to 55% |
| starting torque | less than 20m N.m |
| Intertia moment | less than 25x 10-6kg.m2 |
| Shaft load | Radial 50N; Axial 30N |
| Top REV | 2000RPM ;IP65≤1500 RPM |
| Bearing life | 1.5x109 revs at rated load(100000hrs at 2500RPM) |
| Environmental temperature | Operating:-20 ~+85°;storage:-25 ~+90° |
| Environmental humidity | Operating and storage: 35-85%RH(noncondensing) |
| Vibration(endure) | Amplitude 1.52mm,5-55Hz,2 hours for three axis individually |
| Sock(endure) | 1000m/s2 ,11 ms three times for X,Y,Z direction individually |
| Shaft Material | Stainless steel |
| Shell Material | die cast aluminum |
| Cable length | 1000mm(cable with shielding) |
| Protection grade | IP50;IP65 |
| Cable length | 1M (cable length could be added appropriately by |
| require, but it need payment individually) | |
| Certification | CE |
| package | Carton box |
| Net weight | About 600g (with package) |
Technical Theory of encoder
A logic gate interprets certain input voltages as high (logic 1) or low (logic 0).
TTL (transistor-transistor-logic): A signal above 2 V is interpreted as logic 1 and a signal less than 0.8 V is interpreted as logic 0. The output voltage ranges between 0-5 V.
HTL (high-threshold-logic): A signal above 3 V is a logic 1 and a signal less than 1 V is a logic 0. The high output signal level is dependent from the supply voltage. Because of the higher voltage difference between logic 0 and 1, the HTL logic is more immune to interference and more resistant against electrical noise.
Mechanical degree is the actual rotation of the shaft in degrees. Electrical degree is used for electrical signals. The required time for completing one alternating voltage/current cycle is defined as 360 electrical degrees (el°). For incremental encoders, one cycle is equal to one complete pulse. With a given PPR the electrical degree can be converted to mechanical degree for any incremental encoder.
Every 90 el° the incremental encoder outputs a rising or falling edge on the “A” or “B” output that can be interpreted as a count. If an encoder outputs 1000 PPR, a counter can interpret 4000 counts (4 counts each pulse).
The phase angle states the length between 2 edges, given in el°. This parameter is typically specified with a defined constant phase angle value and phase angle error (also called quadrature error).
Our products are sold all over the world, you can rest assured.