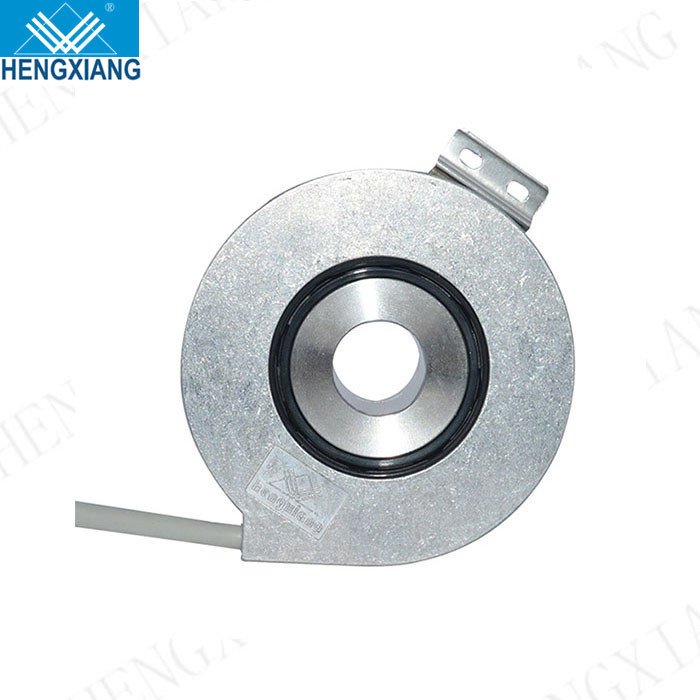
76.5mm Outer Diameter Through Shaft Hollow Shaft Rotary Encoder with Different Resolutions
Main feature of KC76 encoder
Brand: HENGXIANG
Encoder type: Incremental encoder
External diameter: 76.5mm
Thickness: 28mm
Installation dimension: R34.5mm(spring plate 76T69)
Hollow shaft diameter: 18mm,20mm,22mm;25mm
Outlet type: Cable out from side
Supply voltage: DC5V ; DC8-30V
KC76 Series encoder Parameter table
| Items | Basic parameters |
| Brand | HENGXIANG |
| Encoder type | Incremental encoder |
| External diameter | 76.5mm |
| Thickness | 28mm |
| Installation dimension | R34.5mm(spring plate 76T69) |
| Hollow shaft type | through hole with slot |
| Hollow shaft diameter | 18mm,20mm,22mm;25mm |
| Resolution | 100;200;250;300;360;400;450;500;512;600;720;800;1000; 1024;1200;1800;2000;2048;2500;3000;3600;4096;5000; |
| 7200;8192;10000;14400;16384;28800;32768 | |
| 1024/4;1024/6;1024/8;2048/4;2048/6;2048/8;2500/4;2500/6; 2500/8;4096/4;4096/6;4096/16;5000/6;5000/8;5000/10; 5000/12;5000/16; | |
| 8192/8;8192/10;/8192/16;10000/8;10000/10;10000/16; | |
| Output phase | Phase A+,B+,Z+,A-,B-,Z-,U+,V+,W+,U-,V-,W- |
| Bearing life | 1.5x109 revs at rated load(100000hrs at 2500RPM) |
| Environmental temperature | Operating:-20 ~+85°;storage:-25 ~+90° |
| Environmental humidity | Operating and storage: 35-85%RH(noncondensing) |
| Vibration(endure) | Amplitude 0.75mm,5-55Hz,2 hours for three axis individually |
| Sock(endure) | 1960m/s2 ,11 ms three times for X,Y,Z direction individually |
| Shaft Material | Stainless steel |
| Shell Material | die cast aluminum |
| Cable length | 1000mm(cable with shielding) |
| Protection grade | IP50 |
| Cable length | 1M (cable length could be added appropriately by |
| require, but it need payment individually) | |
| Certification | CE |
Encoder Operation method
An incremental encoder outputs a defined amount of pulses per revolution, so that every pulse is expected to be on a defined mechanical position. The maximum deviation between this ideal position and the actual position is called integral non linearity (INL). The INL accuracy is an important value if the incremental encoder is used for positioning tasks.
The duty cycle describes the ratio between “high” time to “low” time of an incremental encoder. Typically this ratio is 50/50, which is equivalent to 180 el° high and 180 el° low.
The performance of magnetic incremental encoders increases with higher PPR settings and higher rotation speeds (RPM). This is in contrast to optical encoders where the performance decreases. The DNL and INL accuracy that are stated in our datasheets are worst case values, a better performance can be expected for higher PPR and RPM.
This is the maximum frequency that the encoder is able to output via the output lines.
For example, the frequency of a 1024 PPR encoder that rotates at 600 RPM is 200 Hz (200*1024/60s).
![]()
Signal Circuit of encoder
1. The NPN Open Collector -- The NPN Open Collector(NPN) is an interface based on an output circuit with an NPN transistor.
An open collector is the unconnected collector connection of an NPN transistor, whose emitter is connected to earth and whose collector is connected to the output.
2. PNP output
The PNP output is an interface based on an output circuit with a PNP transistor.
3. Push-Pull output(HTL)
High Voltage Transistor Logic functions with a voltage supply in the range 10 and 30 V DC, with 24 V DC being the most usual.
“Low” is defined as an output of between 0 V and 3 V and “high” as between VCC and VCC - 3.5 V.
4. TTL RS-422 output
In a transistor-transistor logic (TTL), both the logical status and the amplification are done by transistors, hence the name.
The TTL output is supplied with either a fixed 5 V voltage or a variable voltage of between 10 and 32 V. For this the low range is defined as the ≤ 0.4 V and the high range as ≥ 2.4 V.
Our products are sold all over the world, you can rest assured.