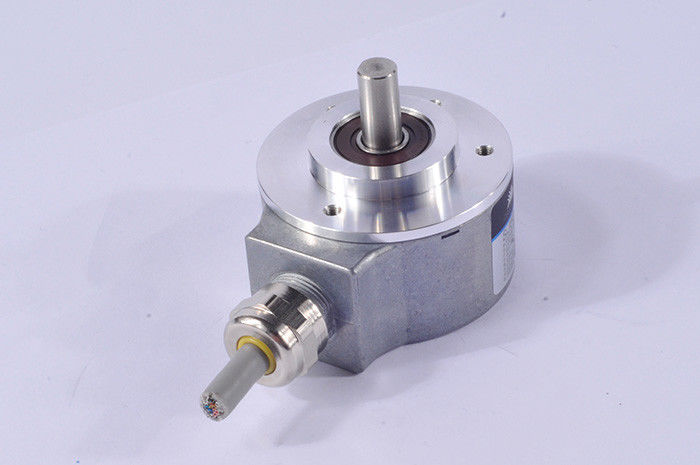
SJ50 single turn absolute encoder gray code output 10 bit solid shaft 8mm
Quick review for SJ50 absolute encoder
Encoder type: absolute encoder
External diameter: 51mm
Solid Shaft diameter: 8mm D shape
Shaft length: 16mm
Protection grade: IP50 ; IP65
Consumption current: 100mA MAX
Top response frequency: 100KHZ
Shell Material: die cast aluminum
Package: Carton box
SJ50 Product Information
| Items | Basic parameters |
| Brand | HENGXIANG |
| Encoder type | absolute encoder |
| External diameter | 51mm |
| Bit(steps) | 5 bit;6 bit;7 bit;8bit;9bit;10 bit;11 bit;12bit |
| Supply voltage | DC5V ; DC8-30V |
| Outlet type | Radial cable |
| Radial socket | |
| Radial cable with plug | |
| Count direction | counterclockwise |
| outside control direction | |
| clockwise | |
| Interface | NPN low level effective |
| NPN high level effetive | |
| Protection grade | IP50 ; IP65 |
| Cable length | 1M (cable length could be added appropriately by |
| require, but it need payment individually) | |
| Consumption current | 100mA MAX |
| Top response frequency | 100KHZ |
| Allowable ripple | ≤3%rms |
| Load Voltage | ≤DC30V |
| Output code | gray code |
| Precision | 360/(resolution x 4) |
| Insulation strength | AC500V 60s |
| Insulation resistance | 10MΩ |
| GND | not connect to encoder |
| Cable length | 1000mm(cable with shielding) |
| Certification | CE |
| package | Carton box |
![]()
Payment terms:
1. T/T, western union, credit card, Paypal, etc
2. 3-5 working days after payment received
3. Encoders will be shipped once ready
Production date
1. for 1-10 samples: 3-5 working days
2. for 20-50 mass production: 7-10 working days
3. for over 100pcs, production will be discussed with customers and ship on time
Connecting Coupling Part Number:
There are some applications that you may need to use a coupling to connect encoder to the motor shaft, there’re a few tips to select a coupling type
1 you need to consider the magnitude and nature of the required transmitted torque, the requirements for buffering and damping functions, and whether resonance may occur.
2 you also need to think about the degree of relative displacement of the two axis axes caused by manufacturing and assembly errors, shaft loading and thermal expansion deformation, and relative motion between components.
3 regarding the applicable dimensions and installation methods, in order to facilitate the assembly, adjustment and maintenance of the necessary operating space. For large couplings, it should be possible to disassemble the shaft without axial movement.
4. In addition, consideration should be given to the working environment, service life, and lubrication, sealing, and economic conditions. Refer to the various coupling characteristics and choose a suitable coupling type.
5. Here are some coupling part number, please carefully check before ordering.
6M6
6M8
8M8
8M10
6W6
6W8
8W8
8W10
About Encoder Vibration
Vibration acting on an encoder always cause wrong pulse easily.
So we have to pay more attention to encoder working place.
The more pulse per round, the narrower groovy spacing of grating, ore effect to encoder by vibration, when motor speed is low or even stopped, vibration acting on encoder shaft or encoder shell would cause grating vibration, in this way, encoder might show wrong pulse signal.
Our products are sold all over the world, you can rest assured.